1、 The two have something in common
The basic concept of servo is accurate, accurate and fast positioning. Frequency conversion is a necessary internal link of servo control, and there is also frequency conversion (stepless speed regulation) in servo driver. But the servo will current loop speed loop or position loop closed control, this is a big difference. In addition, the structure of the servo motor is different from that of the ordinary motor, which should meet the requirements of fast response and accurate positioning. At present, most of the AC servo motors in circulation on the market are permanent magnet synchronous AC servo. However, due to the process limitation, it is difficult to achieve high power. The price of synchronous servo of more than ten kW is extremely expensive. Thus, AC asynchronous servo is often used when field application permits. At this time, many drivers are high-end frequency converters with encoder feedback closed-loop control. The so-called servo is to meet the requirements of accurate, accurate and rapid positioning. As long as it is satisfied, there will be no dispute on servo frequency conversion.
AC servo technology itself is to learn from and apply the frequency conversion technology, on the basis of DC motor servo control, through frequency conversion PWM mode to imitate the control mode of DC motor, that is to say, AC servo motor must have the link of frequency conversion: frequency conversion is to convert 50 Hz and 60 Hz AC into DC first, and then through the control of the gate pole Transistor like transistors (IGBT, IGCT, etc.) are converted into adjustable frequency waveform through carrier frequency and PWM modulation, which is similar to sine and cosine pulse current. Because the frequency is adjustable, the speed of AC motor can be adjusted (n = 60F / P, n speed, f frequency, P-pole pairs)
2、 Talk about frequency converter:
Simple frequency converter can only adjust the speed of AC motor. At this time, it can be open-loop or closed-loop, depending on the control mode and frequency converter. This is the traditional V / F control mode. Now many frequency converters have established mathematical models to convert the stator magnetic field uvw3 phase of AC motor into two current components that can control the motor speed and torque. Now most famous brand inverters that can control torque use this way to control torque. The output of each phase of UVW needs to be added with current detection device of Hall effect, and the output of each phase is closed after sampling and feedback The current loop PID control with negative feedback loop; ABB frequency conversion also proposes a direct torque control technology different from this way. Please refer to relevant information for details. This can not only control the speed of the motor but also control the torque of the motor, and the speed control accuracy is better than V / F control, encoder feedback can be added or not, the control accuracy and response characteristics are much better.
3、 Talk about servo:
Driver: on the premise of the development of frequency conversion technology, the current loop, speed loop and position loop (the frequency converter does not have this loop) in the drive have carried out more accurate control technology and algorithm calculation than the general frequency conversion. In terms of function, it is much more powerful than the traditional frequency conversion, and the main point is that it can carry out accurate position control. The speed and position are controlled by the pulse sequence sent by the upper controller (of course, some servos have integrated control units or set the parameters such as position and speed directly in the driver by means of bus communication). The algorithm inside the driver, faster and more accurate calculation and better electronic devices make it more superior to the frequency converter.
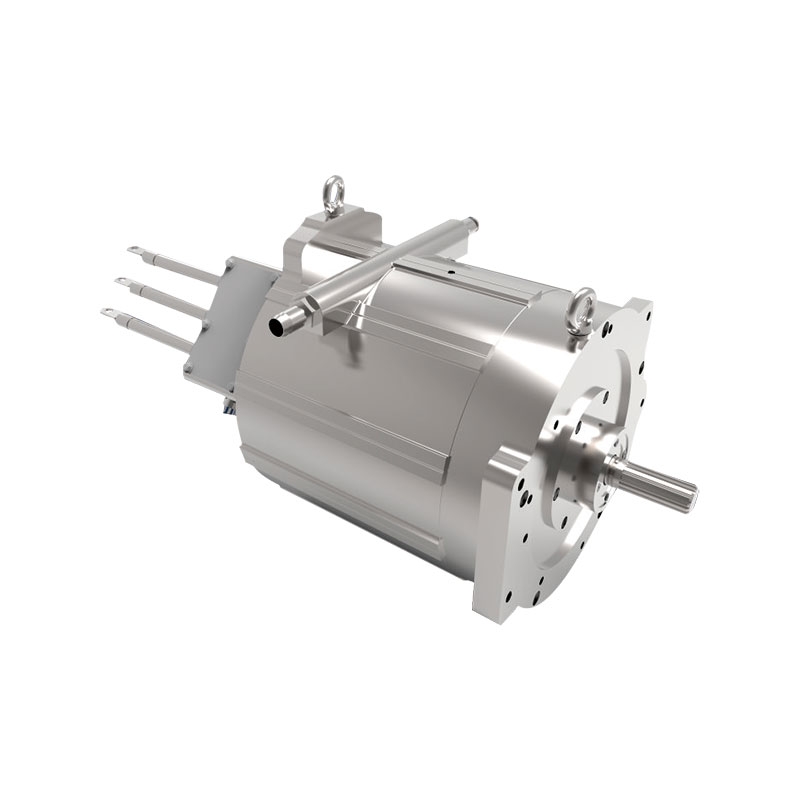
Motor: the material, structure and processing technology of servo motor are much higher than those of AC motor driven by frequency converter (general AC motor or variable frequency motor with constant torque and constant power). That is to say, when the driver outputs the power supply with fast changes in current, voltage and frequency, the servo motor can produce response action change, response characteristics and anti overload according to the power supply change The ability is much higher than that of AC motor driven by frequency converter, and the serious difference in motor is also the root of the difference in performance between them. That is to say, it is not that the inverter can not output the power signal which changes so fast, but the motor itself can not respond. Therefore, in order to protect the motor, the corresponding overload setting is made in the internal algorithm setting of frequency conversion. Of course, even if you do not set the inverter output capacity is still limited, some good performance inverter can directly drive the servo motor!!!
4、 Talk about AC motor:
AC motor is generally divided into synchronous and asynchronous motor
1. AC synchronous motor: that is, the rotor is composed of permanent magnet materials, so after rotation, with the change of the motor stator rotating magnetic field, the rotor also changes the speed of response frequency, and the rotor speed = stator speed, so it is called "synchronization".
2. AC asynchronous motor: the rotor is composed of induction coil and material. After rotation, the stator produces a rotating magnetic field. The magnetic field cuts the induction coil of the stator, and the rotor coil generates the induced current. The induced magnetic field follows the change of the rotating magnetic field of the stator, but the change of the magnetic field of the rotor is always less than that of the stator. Once the magnetic field is equal to the unchanged magnetic field, the induction coil of the rotor will be cut, and there will be no induced electricity in the rotor coil Flow, the rotor magnetic field disappears, the rotor stall and the stator produce speed difference, and then get the induced current again... Therefore, there is a key parameter in AC asynchronous motor, which is the ratio of rotor to stator speed difference.
3. Corresponding to AC synchronous and asynchronous motor frequency converter, there are corresponding synchronous frequency converter and asynchronous frequency converter. Servo motor also has AC synchronous servo and AC asynchronous servo. Of course, AC asynchronous frequency conversion is common in frequency converter, while AC synchronous servo is common in servo.
5、 Application
Due to the difference in performance and function between inverter and servo, their applications are not the same
1. In the situation of speed control and torque control, frequency converter is generally used, and position feedback signal is added in the upper position to form a closed-loop position control with frequency conversion, the accuracy and response are not high. At present, some frequency conversion also accept the pulse sequence signal to control the speed, but it seems that they can not directly control the position.
2. In the situation with strict position control requirements, servo can only be used to achieve. In addition, the response speed of servo is far greater than that of frequency conversion. Some occasions with high requirements for speed accuracy and response are also used for servo control. Almost all the motion occasions that can be controlled by frequency conversion can be replaced by servo. The key points are two points: one is that the price servo is much higher than the frequency conversion; the other is the power reason: variable Frequency of the largest can achieve hundreds of kW, or even higher, the largest servo dozens of kW.

|
|

|
| The public, | Mobile station |
 0755-81719517
0755-81719517
|
|
 0755-81719530 0755-81719530 |
 amb@ambition.com.cn amb@ambition.com.cn |
 Floor 1, 5 and 6, building 7, lijincheng science and technology industrial park, gongye dong road, longhua new district, shenzhen Floor 1, 5 and 6, building 7, lijincheng science and technology industrial park, gongye dong road, longhua new district, shenzhen |
|

 English
English 中文
中文